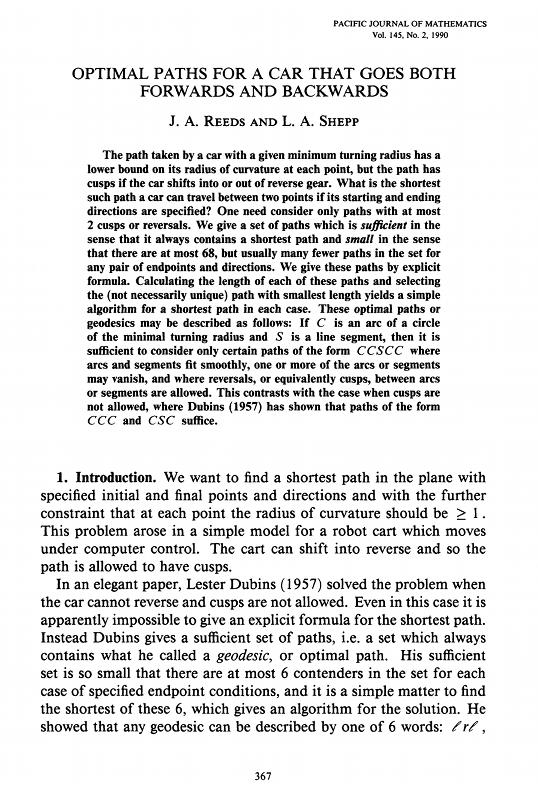
В 1990 г. американские математики Джеймс А. Ридс и Лоуренс А. Шепп опубликовали в Pacific Journal of Mathematics (том 142, номер 2) статью об оптимальном управлении системой, в которой одна компонента управления влияет на радиус разворота объекта, а вторая мгновенно изменяет направление движения на противоположное. Авторы понимали, что мгновенное изменение является идеализацией, поэтому написали в разделе 2, что для медленно движущихся объектов такое допущение является разумным компромиссом, обеспечивающим возможность математического исследования задачи.
Предложенная модель динамики стала очень популярной в литературе по математической теории управления, особенно среди специалистов по теоретической робототехнике. Ее стали называть "машина Ридса – Шеппа".
Мы также использовали модель Ридса – Шеппа в работах по дифференциальным играм. Несколько своих статей послали Л. Шеппу. Сохранились письма Л. Шеппа, в которых он распрашивал о современном состоянии теории дифференциальных игр и вспоминал эпизоды своего пребывания в Москве в 1966 – 67 гг., когда он проходил стажировку в коллективе А.Н. Колмогорова.
Лоуренс Шепп умер 23 апреля 2013 г. В Пенсильванском университете, где он работал в последнее время, 30 января 2014 г. было проведено заседание его памяти. В Центре прикладных задач теории вероятности (The Center for Applied Probability (CAP)) Колумбийского университета 25 апреля 2014 года прошла научная конференция в честь Л. Шеппа. В Колумбийском университете он работал в 1973 – 96 гг.
Ниже мы выкладываем начальную часть знаменитой статьи Д. Ридса и Л. Шеппа; список некоторых публикаций, в которых использовалась модель динамики Ридса – Шеппа; текст научной биографии Л. Шеппа, подготовленный организаторами заседания его памяти в Пенсильванском университете; видео с двумя фрагментами этого заседания: выступление Д. Ридса и выступление профессора Э. Георга (ведущий заседания), который представил наши слайды и прокомментировал их; в конце выложена презентация Д. Ридса на конференции в честь Л. Шеппа в Колумбийском университете.
В.С. Пацко, В.Л. Турова
Первые семь страниц статьи Ридса и Шеппа.
1. Sussman H., Tang W. Shortest paths for the Reeds – Shepp car: a worked out example of the use of geometric techniques in nonlinear optimal control. Tech. Rep. SYCON-91-10, Rutgers University, 1991.
2. Boissonnat J.-D., Cereso A., Leblond J. Shortest path of bounded curvature in the plane. J. Intelligent and Robotic Systems, vol. 11, 1994, pp. 5–20.
3. Soueres P., Fourquet J.-Y., Laumond J.-P. Set of reachable positions for a car. IEEE Trans. on Automatic Control, vol. 39, no. 8, 1994, pp. 1626–1630.
4. Дегтярева-Костова Е., Костов В.П. Субоптимальные пути в задаче плоского движения с ограничением на производную кривизны траектории. Автоматика и Телемеханика, N 7, 1997, c. 132–150.
5. Laumond J.-P. (Ed.) Robot Motion Planning and Control, Berlin, Springer-Verlag, 1998.
6. Venditelli M., Laumond J.-P., Nissoux C. Obstacle distance for car-like robots. IEEE Trans. on Robotics and Automation, vol. 15, no. 4, 1999, pp. 678–691.
7. Fraichard T., Scheuer A. From Reeds and Shepp's to continuous-curvature paths. IEEE Trans. on Robotics and Automation, vol. 20, no. 6, 2004, pp. 1025–1035.
8. Wang H.-F., Chen Y.-Z. Time-optimal trajectories for a car-like robot. Acta Automatica Sinica, vol. 34, no. 4, 2008, pp. 445–452.
9. Patsko V.S, Turova, V.L. From Dubins' car to Reeds and Shepp's mobile robot. Computing and Visualization in Science, vol. 12, 2009, pp. 345–364.
10. Patsko V.S., Turova V.L. Numerical investigation of the value function for the homicidal chauffeur problem with a more agile pursuer. In: Advances in Dynamic Games and Their Applications (Annals of the International Society of Dynamic Games), edited by P. Bernhard, V. Gaitsgory, O. Pourtallier, Boston: Birkhauser, vol. 10, 2009, pp. 231–258.
11. Boscain U., Rossi F. Projective Reeds – Shepp car on S2 with quadratic cost. ESAIM: Control, Optimisation and Calculus of Variations, vol. 16, no. 2, 2010, pp. 275–297.
12. Dolgov D., Thrun S., Montemerlo M., Diebel J. Path planning for autonomous vehicles in unknown semi-structured environments, International Journal of Robotics Research, vol. 29, no. 5, 2010, pp. 485–501.
13. Lu W. A direct method to find optimal trajectories for mobile robots using inverse kinematics. Thesis, Dartmouth College, 2011.
14. Shevchenko I. Locally optimizing strategies for approaching the furthest evader. Contributions to Game Theory and Management, vol. 5, 2012, pp. 293–303.
15. Dmitruk A.V., Samylovskiy I.A. Optimal synthesis in the Reeds and Shepp problem with oneside variation of velocity. JOTA, vol. 158, no. 3, 2013, pp. 874–887.
Если не воспроизводится, скачайте ролик по ссылке: episod1_00.mp4.
Если не воспроизводится, скачайте ролик по ссылке: episod2_01.mp4.